Over the last year I've developed a new algorithmic process for agent based modelling. This is based on a space analysis and on the OMCA rules coupled to a local scanning heuristic.
Creating a model using agents
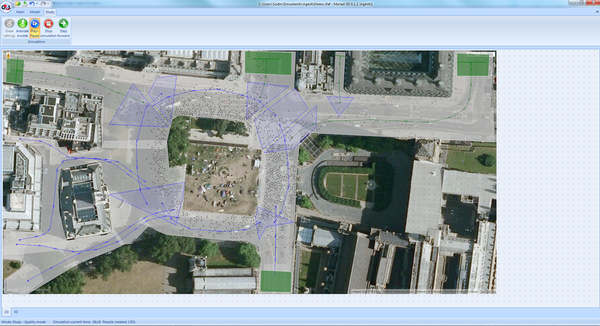
Below an image of a complex space (pedestrian only) where we want to test a range of behaviours and movements. This is designed to assess complex build up in a visual (3D agents) system for gaining and education purposes. A wide range of analytical data is available from the system.
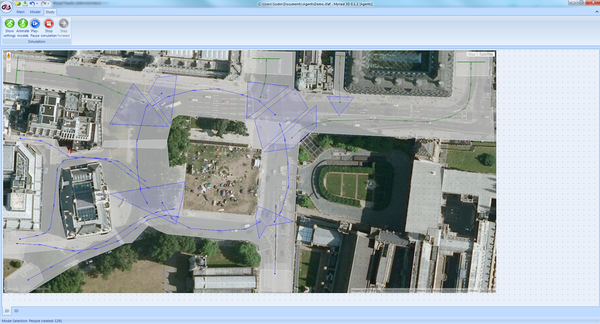
Below - creating Origin and Destinations in the modelling system.
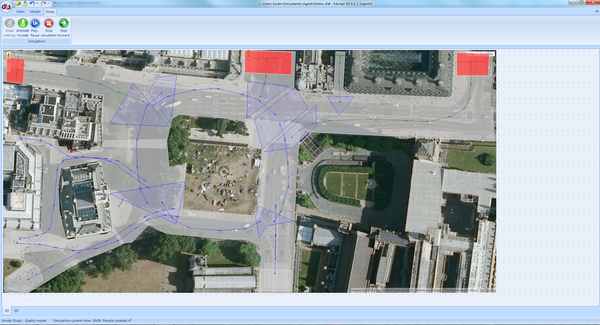
Defining the timing zones (enter from X time and stop crowd flow at Y time).
Entry points and exit points are colour coded to assist in model building.
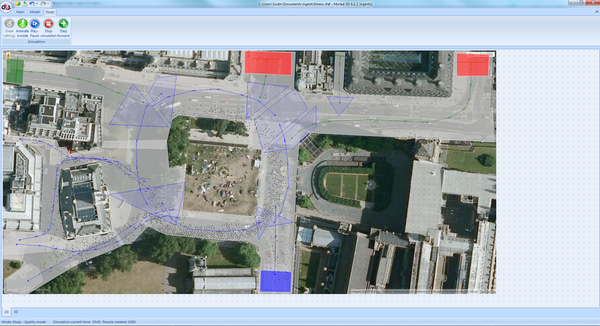
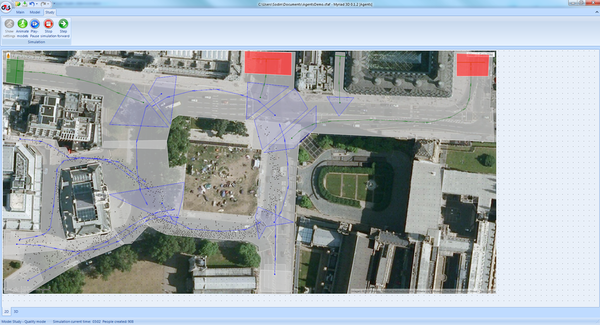
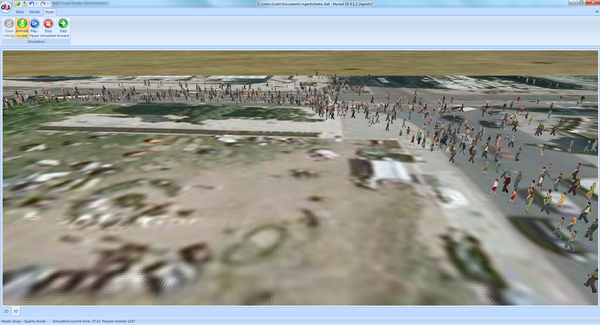
Below - agents are moving in the system. Note the entry/exit zones (origins, destination) are switching on/off and the rules (polygons) in the system influence behaviour (the user can enter different types of behaviour in different zones)
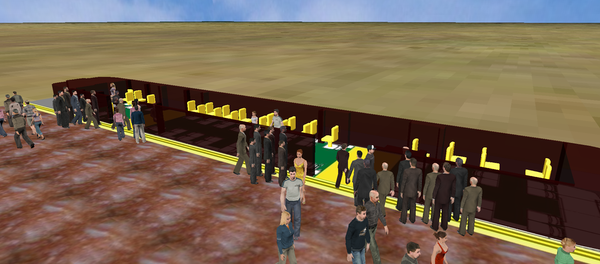
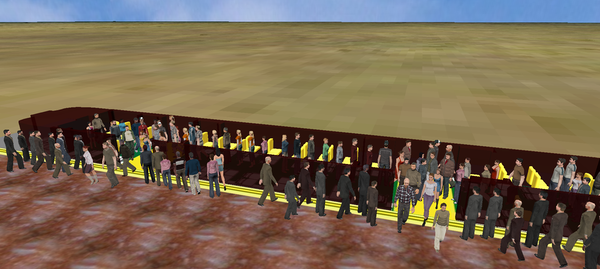
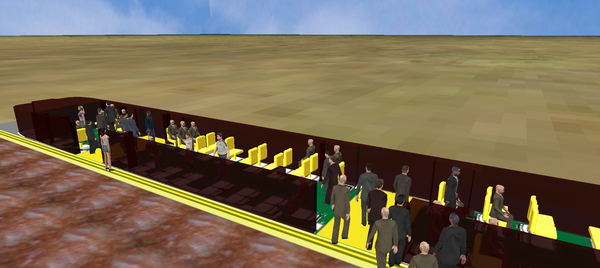
Which we can view in 3D (pan/zoom). This allows the user to capture images of how the crowd may move under certain conditions.
Below - once the model (above) is built - the user can fly around the simulation from head height to birds eye view.
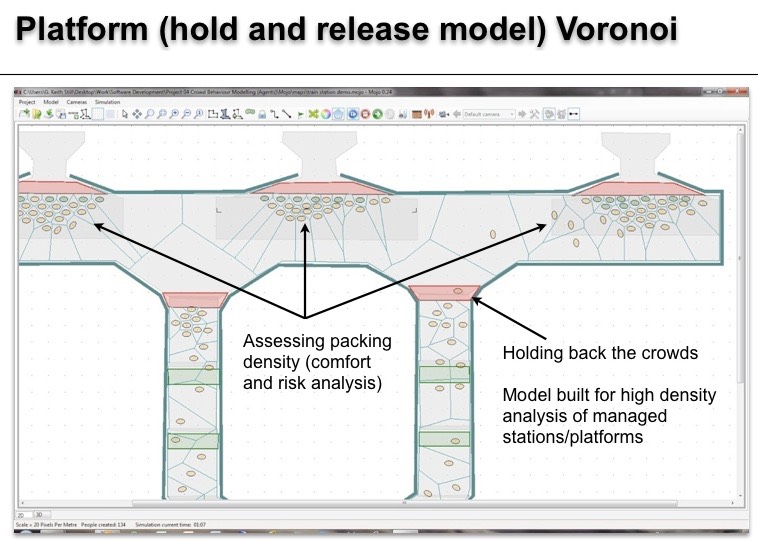
Unlike several modelling tools in the market our agents compress (i.e.: this is not a fixed/maximum density model) - this allows me to assess pressure and risk. As far as I'm aware no other modelling tool has this capability.
Below - model of Tafaw (Saudi Arabia)
Below - model of a progressive crowd collapse (shockwave) at a concert.
See Pressure Modelling for more information on the above.
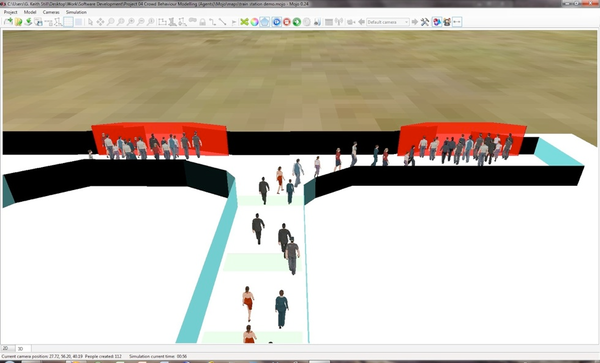
Above and below - models of moving crowds queuing and loading onto a train - these models allow the agents to pack to high density and therefore are indicative of risk. We use these tools to determine both the comfort (value engineering) and risk (crushing) in complex space.